
精准的控制EVO 电子控制系统大解析
与其他性能跑车相比,EVO 最让人称道的就是精准的路感和控制性能,这也是它雄居WRC 冠军多年的利器之一。在AYC 与ACD 两大电子辅助控制系统以及经过高度进化的四轮传统控制系统的辅助下,EVO不但呈现出自然的驾驭感受,亦可得到与过去无法比拟的极限性能与控制性能。

ACD (Active Center Differential)
从EVO VII 开始采用的ACD,在其中央差速器限制装置中采用了电子控制的油压多
级离合器,ECU 根据行驶状况控制前后轮的差动限制力,从而使其从自由状态到直接关
联状态。它是将转向控制性能和牵引力性能在高层次分开的系统。在控制方面设定了干燥
砂石路面(TARMAC)、湿路面和未铺设砂石路面(GRAVEL)、积雪道路(SNOW)三种
方式。所谓的超级AYC 是一个独立的ECU(行车控制电脑)来进行统一控制。

超级AYC (Super Active Yaw Control)
从EVO IV 起开始采用的AYC,通过后部差速器内安装的扭矩转移结构,用ECU 根
据行驶状况控制左右后轮的驱动力差。它是控制作用于车体的小型力矩(转弯力),是提
高转弯性能的系统。
EVO VIII 上安装的改进版超级AYC,将差速器结构由斜面齿轮式改为星星齿轮式,
将最大扭矩的转移量增加到大约AYC 的两倍,由于底层转向盘的重量减轻,所以提高了
转弯限制力,也发挥了像LSD 这种牵引力的性能。ACD 由一个ECU(行车控制电脑)统
一控制,可以实现多重控制的效果。
从EVO VIII MR 开始,离合器外壳由不锈钢材料换成了铝材料,同时重新设计了离
合器仪表台的厚度,重量大约减轻了0.8 千克。另一方面,为了适应引擎扭矩的提高,差
速器的偏轴伞改为高强度钢制品,抗疲劳性大约提高到原来的1.2 倍。
运动型ABS(Sport Antilock Braking System)
从EVO VII 开始采用的运动型ABS,增加了一组轮速传感器,是一种与测知车辆减
速和转弯状态的G 传感器一起,以从测知方向盘状态的方向盘角度传感器得到情报为基础,
使用ECU(行车控制电脑)独立控制四个车轮,并在制动状态下提高转向操控性能的系统。
自EVO VIII MR 开始,使控制(特别是在干燥的沙石路等高速路上的控制)细分达到最合
适化,即使是在有起伏的路面上,也能够得到较高的减速度。
另外,通过电子控制前后轮的制动力分配以达到最适合化的EBD(电子控制制动力
分配系统)在极限领域刹车时,后轮分配到的制动力增大,前轮的负担减轻,再加上耐老
化性能的提高,针对路面状况和载重状态的变化,能发挥更稳定的制动性能。
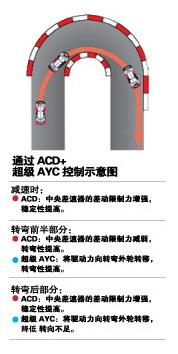
通过ACD+
超级AYC 控制示意图
减速时:
ACD:中央差速器的差动限制力增强,
稳定性提高。
转弯前半部分:
ACD:中央差速器的差动限制力减弱,
转弯性提高。
超级AYC:将驱动力向转弯外轮转移,
转弯性提高。
转弯后部分:
ACD:中央差速器的差动限制力增强,
稳定性提高。
超级AYC:将驱动力向转弯外轮转移,
降低 转向不足。
|
不支持Flash
|