在目前的车用激光雷达供应商中,几家欧美企业广为人知。他们都在忙着把激光雷达装上汽车,并且越做越小与做越便宜。除此之外,有一家日本企业——先 锋(Pioneer)也借助今年年初的上海CES亮相了正在研发的激光雷达,采用的技术路线来自多年的影碟机技术积累,并且先锋正在通过激光雷达和地图产 品,切入日益火热的自动驾驶领域。
 从影碟机到激光雷达
从影碟机到激光雷达目前先锋正在研究的激光雷达为单线激光雷达,可以分辨出100m前方的最小10cm大小的物体。水平视角为240度,垂直视角为20度,可以内置到车辆四角车灯内。
几项参数可能会引起困惑——一款1线产品怎么做到水平和垂直的范围覆盖?先锋的工程师告诉我们的答案恰巧也是这款激光雷达的核心技术——MEMS(Micro Electro Mechanical Systems,微机电)技术。
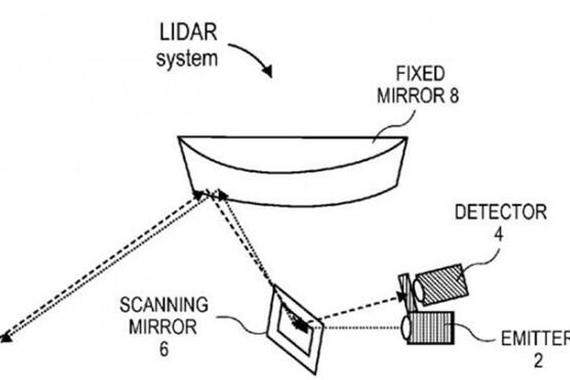
 用一张图来说明一下MEMS激光雷达技术原理,图片来自MEMS资讯网
用一张图来说明一下MEMS激光雷达技术原理,图片来自MEMS资讯网先 锋的激光雷达只有一个激光二极管发射器,单束激光打到上下左右震颤的MEMS镜面后经过透镜发出,就可以对外形成一个螺旋状扫描。 据先锋工程师介绍,这款单线激光雷达可达到市面上16线激光雷达的探测效果。从外部看,整个激光雷达是静止的,但是内部因为有活动部件,所以按照市面上 流行的说法,应该属于混合固态激光雷达。
MEMS技术的难点在于可控的高频振动。为保证实时检测,1s要震动数十万次。以先锋的前方障碍物探测的激光雷达为例,要看到前方100处10cm大小的物体,那么角分辨率就要达到0.05度。对激光雷达这样要求精准测量的传感器而言,MEMS的控制要求很高。
 先锋激光雷达采集获得的3D点云数据和道路轮廓线数据
先锋激光雷达采集获得的3D点云数据和道路轮廓线数据不过,先锋将MEMS技术用到激光雷达,并不是为了这款产品才从0开始研究。
早 在先锋的影碟机产品中,就用到了光拾取技术——通过激光将信息写入光盘或从光盘上读出数据。以往产品积累的经验,已经可以将发射的激光通过透镜和其他元件 调整,形成一个比较好的束斑。另外影碟机在接收反射光束转换为电信号上,也和激光雷达共通。而先锋此前推出的激光HUD,也用到了类似的技术。
为了更低的成本和更小的体积
这种MEMS方案和常规的机械激光雷达相比,可以把体积做小,把成本降低。MEMS是在毫米尺度上对材料进行设计、加工、制造、测量和控制的技术,会将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元。
和传统的机械旋转式的激光雷达相比,先锋激光雷达的技术路线完全不同。因为取消了机械马达旋转部件,使用了体积更小的MEMS镜,所以体积可以做到更小。再加上只要一个激光头,因此可以有效控制成本。
关于先锋激光雷达的价格,会和产品的年产量挂钩,当订单达到100万,先锋便可以把价格控制在100美元以下。工程师向车云菌表示,目前产品正在加紧研发阶段,预计会在2019年开始量产。
目前有不少企业都在等待产量上升后摊薄成本,因此需要考核的是如何保证产量。上文也提到,MEMS对精度要求很高,因此在生产制造有别于一般电子产品制造,生产企业在生产上要把控很多细节:制造精度是不是足够、转镜抛光是不是刚好、MEMS机械精准度如何。
对 一直处于精益加工的先锋来说,已经积累了不少生产经验。比如激光雷达所需的透镜,抛光后两面要满足指定弧度,国内大部分工厂可能都无法达到要求。另外 MEMS镜的翻转都要严格控制角度,假设需要翻转角度是0.001度,还要在此微小变化基础上将翻转公差保证在可控范围就是一个细活。
先锋向车云菌透露,未来计划里激光雷达的生产将会放到中国。先锋原本就有生产激光产品的工厂,因此也希望能利用该优势,在先锋中国的工厂进行生产,而不是寻找代工企业。其中最根本的原因,也是出于对产品质量,稳定性及成本的把控。
除了硬件产品之外,先锋也在尝试大幅降低计算量,来满足低成本激光雷达的需要。公司内也在开发专门针对LiDAR信号处理的ECU。未来产品量产供货不会单单提供硬件,也会提供软件产品。物体识别的算法等都在开发,对融合供应商或主机厂来说可能更方便。
不过目前车用激光雷达的竞争已经十分激烈。市场中推出机械激光雷达产品的几家公司,已经开始开始密切和整车厂接触,对产品进行测试和修改,并且各家企业都给出了固态激光雷达的研究计划。
据 悉,Ibeo基于MEMS和相控阵技术方案的激光雷达也在研究开发中,并且在采埃孚入股后,转型为Tier1角色向主机厂供货,预计推出时间为2020年 后。Velodyne的时间表中,2020年给车厂供货的3.0版本也是一款固态激光雷达。产品可以通过软件调整激光束的通道数量,同时发射角度也可以调 节,马达镜片以及反射装置也会固化。
并且据业内人士介绍,目前的几种激光雷达方案中,按照降价潜力排列,应该是相控阵>MEMS>机械,相控阵的技术方案有机会把产品做到最便宜。刚刚获得9000万美元B轮融资的Quanergy,正在研发相控阵激光雷达。
从各家产品推出的时间节点来看,即将迎来一场小型化低成本3D激光雷达的白热化的竞争。
用地图业务切入自动驾驶
除 了激光雷达,一项与其相关业务——高精度地图也开始启动。先锋旗下有一家专门从事地图开发的子公司——Increment P,以往的主要业务是普通地图的制作和供货。未来会将先锋的激光雷达用于高精度地图制作和供货。目前该公司的高精度地图产品正在给数家日本主机厂测试。
配合车身搭载的3D激光雷达,先锋还会开发一款“轻量化高精度地图数据高效制作及运用系统”,这套系统最大的特点是可以制作轻量化的高精度地图,并可以通过计算原地图数据与汽车行驶收集到的实时地图数据之间的差异来更新地图。
 先锋已经不仅仅是人们印象中的影音娱乐、导航产品供应商了。
先锋已经不仅仅是人们印象中的影音娱乐、导航产品供应商了。原 先锋中国汽车商品企划部部长(现先锋日本本社自动驾驶事业企划部部长)高木晴彦曾在一次采访中公布了明确的车载技术进阶路线:娱乐(Audio、 Video)-方便(Navigation)-安全(ADAS)-安心(AI)。地图是帮助先锋从车载影音娱乐提供商延伸到自动驾驶业务的重要产品,本身 也在从普通导航地图渐渐承担起自动驾驶高精度地图的任务。
其实早在先锋今年CES宣布利用激光雷达产品开展高精度地图业务之前,就曾经与Here就高精度地图业务有过交流。先锋有意向Here提供3D激光雷达用于高精度地图的采集。
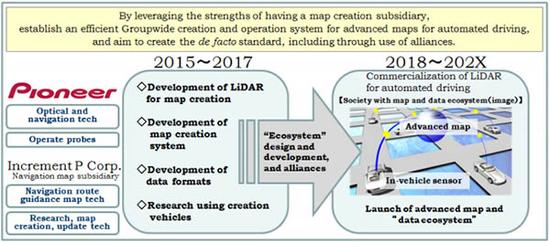
激 光雷达就成为了地图数据的新入口。在先锋给出的激光雷达时间表中,计划在2015年~2017年完成用于绘制地图的激光雷达研发,并且完成上述软件系统的 开发,制定出地图数据标准,用创新技术的车辆进行研究。到2018年~202X年第二个阶段,先锋计划商用自动驾驶所需的激光雷达,形成云端+本地的地图 采集和更新系统。
除了车辆外部的数据采集,车内驾驶员信息收集的相关技术也在同步发展。通过选择与苏州清研微视电子科技有限公司合作开发的疲劳预警系统用于检测驾驶员状况。车机、HUD终端产品因为直接为驾驶员所用,也是驾驶员信息的入口。
最 后当源源不断的数据传送到车内,就能进一步利用人工智能技术——Smart Loop(根据以往记录的驾驶员信息,提供定制化出行路线和服务)和IVCA(In Vehicle Context Awareness,结合当下车内外情况,进行驾驶相关调整,比如自动规划行驶路线、自动播放音乐消除驾驶员疲劳等),来帮助提升智能汽车体验。
车云小结
据 公开资料介绍,先锋中国在近年已具有了企划、研发、生产、销售体制。未来会寻找更多车联网、ADAS相关企业、Tier1零部件供应商进行合作。从积极的 本地建设和合作关系搭建也不难看出,先锋除了在整合资源开展未来自动驾驶相关业务,在中国市场开拓上,也足够积极主动。
责任编辑:刘万睿